5 minutes read
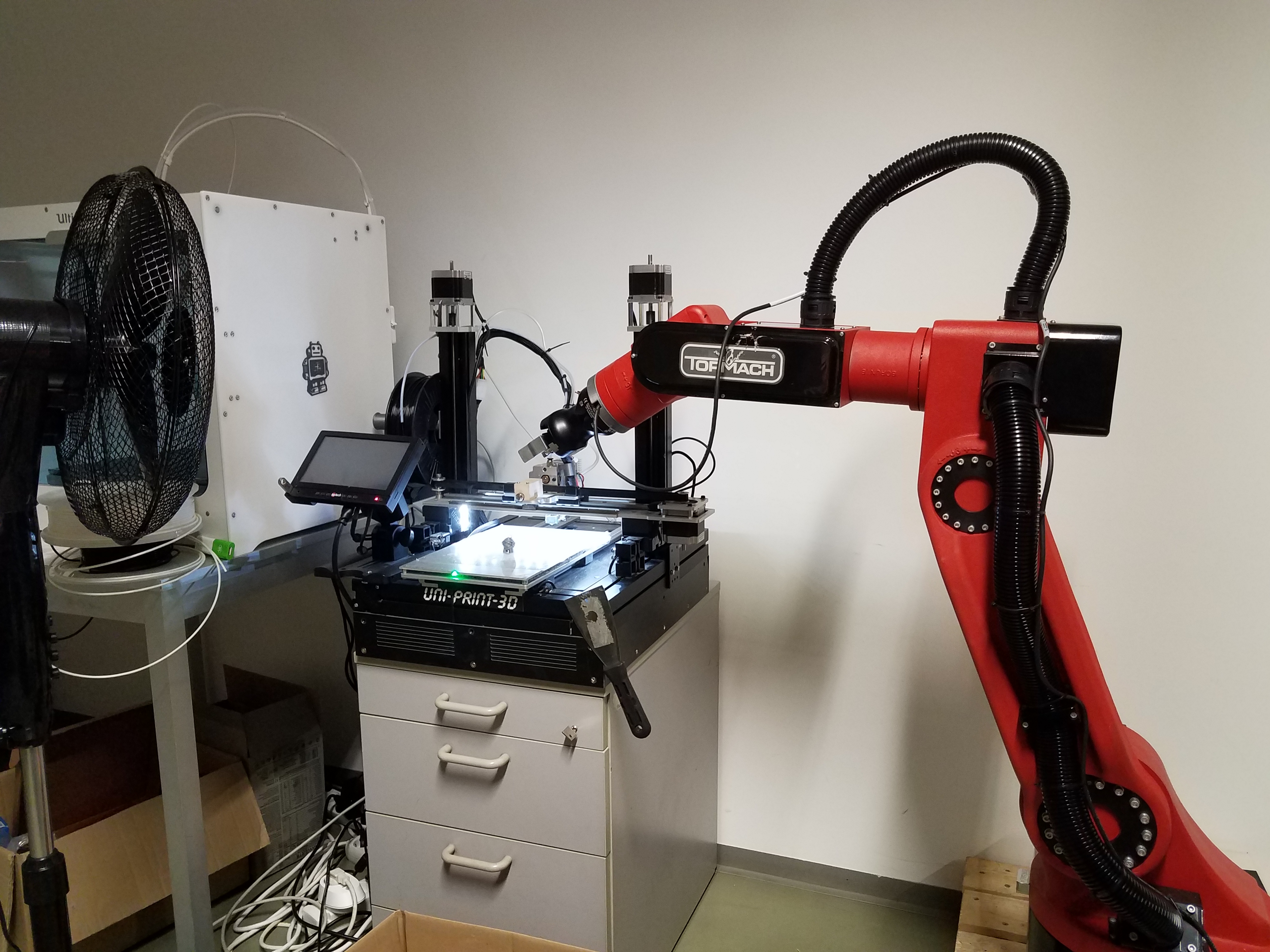
In a previous article, I explained how Machinekit and ROS could be combined to build fully autonomous robots. In this article, I focus on my project of retro-fitting an industrial robot arm with Machinekit and using it with ROS. The combination of ROS and Machinekit leverages the low-level real-time motion control capabilities of Machinekit and the high-level robotic tools that ...